[VIP第1年] 指数:3
[VIP第1年] 指数:3
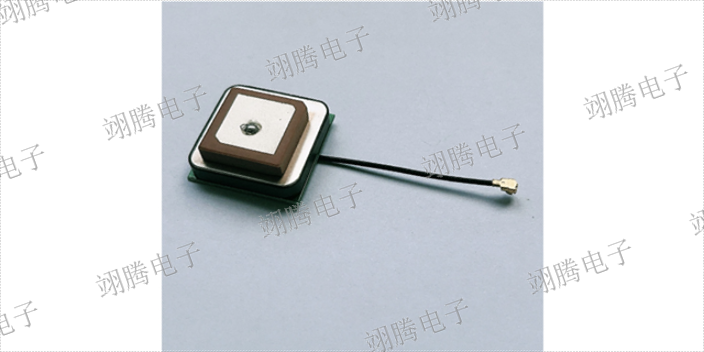
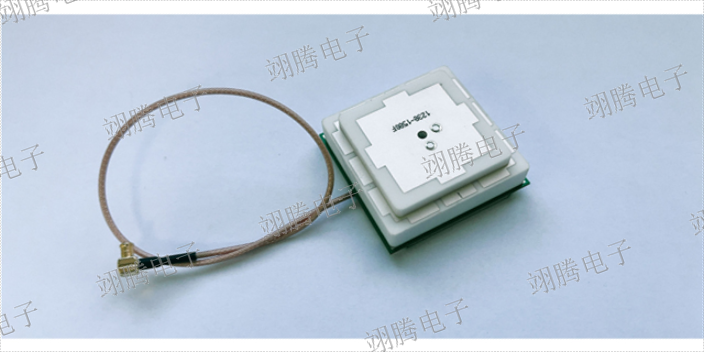
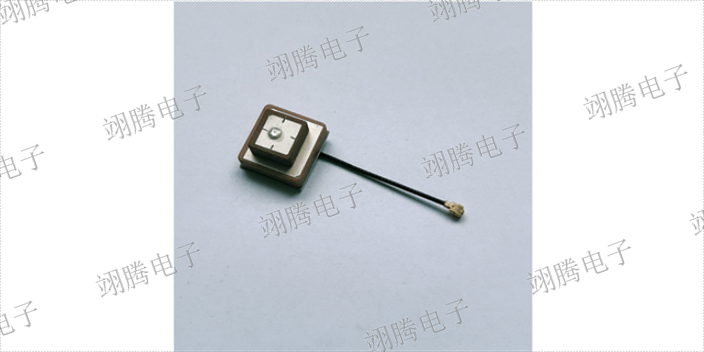
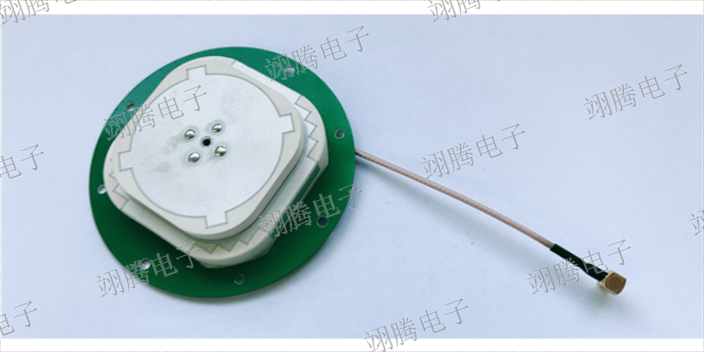
有源天线构造与实物,见下图:红框内GNSS有源天线组成部分为:陶瓷天线、声表滤波器、低噪声放大电路、射频线缆、RF接头。其中低噪声放大电路是将信号进行放大和滤波的部分。2、PCB尺寸对天线性能的影响承载陶瓷天线的PCB形状及面积。由于GNSS有触地反弹的特性,当PCB是7cmx7cm无间断大地时,patch天线的效能可以发挥到***。虽然受外观结构等因素制约,但尽量保持相当的面积且形状均匀。另外放大电路增 益的选择必须配合后端LNA增益;一般不建议有源天线增 益超过29dBm,否则信号过饱和可能会导致自激。RTK天线,助力智慧物流,实现货物追踪。深圳时钟RTK天线

正是由于RTK测量缺少必要的检核条件,加上其RTK本身又有其局限性,比如容易受到多路径效应的影响.受卫星状况限制,在高山峡谷深处、密集森林区及城市高楼密布区,卫星信号被遮挡时间较长,使一天中可作业时间受到限制:比如还受到环境因素的影响,中午GPS受电离层干扰大,共用卫星数少,常接收不到所需卫星,因而初始化时间长甚至不能初始化,也就无法进行动态测量:另外,RTK信号还受反射物(大面积水域、大型建筑物)、高压线、电视台、无线电发射站、微波站、树林等十扰源的环境影响,这些因素都对RTK定位结果精度产生重要的影响,也就导致了RTK的稳定性不如全站仪,因此针对RTK的局限性,有必要对RTK成果的精度进行检测与分折。 深圳滤波器RTK天线高精度RTK天线,为智慧林业提供定位服务。

对射频前端的技术攻关要求就是高增益,低噪声系数,强抗干扰能力,该LNA模块的指标对系统的接收灵敏度有直接的影响。此外还需要兼容所有导航系统频段,电路抗干扰能力强。电路架构设计:在GNSS接收机中,低噪声放大器单元(LNA)单元是不可缺少的重要组成部分,对接收机的灵敏度具有决定性的影响。LNA位于接收机前端主要部分,用于将天线接收到的微弱卫星信号低噪声放大。信号经过低噪声放大、滤波处理后送入BD接收机处理。LNA的信号直接来源于天线,微带天线接收到得卫星信号功率极其微弱(一般小于-130dBm),深埋于环境热噪声(-110dBm)中,所以用于放大信号的LNA性能尤为重要,重点在于低噪声、高增益、线性度良好以及与天线之间匹配。在电路设计中遵循以下原则:①在优先满足噪声小的前提下,提高电路增益,即根据输入等增益圆、等噪声系数圆,选取合适的rs,作为输入匹配电路设计依据②输出匹配电路设计以提高放大器增益为主。③满足稳定性条件。由于无源天线分成两路输出,相应的低噪声放大器也分成两路,通过前置滤波器,对带外信号抑制,再由***级低噪声放大器,然后采用两个滤波器组成双频合路器,合成一路放大输出。为了有效降低噪声系数以提高系统灵敏度。
尽管常规RTK定位技术是目前**为***使用的测量技术之一,使它的应用受到不少因素影响与限制,但就GPS系统而言,仍有一些固有因素,用户无法控制,其使所测成果的可靠性带来影响。
(1)星数在RTK定位测量中,不仅在0TF求解末知模糊度时,需要5颗共同星,而且在RTK动态验潮过程中,也需要能跟踪到5颗星。截止高度角低于15°时,共同星数将增加。但是,由此而采集到的数据含有较差的信噪比,这将使求解模糊值的时间延长。虽然,星数增加太多对RTK定位的精度没有显著提高,但定位的可靠性有了很好提高。(2)卫星几何强度因子卫星几何强度因子将影响***定位成果的质量。目前常用PDOP(或XDOP)来衡量其优劣。在RTK中,PDOP不宜大于3。 RTK天线的性能不断提升,为各行业的发展提供了有力的支持。

基准站上应配置双频全波长GPS接收机,该接收机能同时提供精确的双频伪距观测值。基准站按规定的采样率进行连续观测,并通过数据链实时将观测资料传送给数据处理中心,其通信方式可采用数字数据网DON或其他方式。而流动站可以采用数字移动电话网络,如GSM、CDMA、COPD或GPKS等方式向控制中心传送标准的NMEA位置信息,告知它的概位。控制中心接收到其信息后重新计算所有GPS观测数据,并内插到与流动站相匹配的位置。数据处理中心根据流动站送来的近似坐标来判断该站位于哪三个基准站所组成的区域内,然后根据这三个基准站的观测资料求出该流动站处所受到的系统误差,再向流动站发送改正过的KTCM信息,流动站根据接收到的KTCM信息,结合自身GPS观测值,组成双差相位观测值,快速确定整周模糊度参数和位置信息,完成实时定位。流动站可以位VRS网络中任何一点,这样流动站的RTK接收机的定位系统误差就能减少或削弱,提高了定位的准确度、可靠度。这是一种为一个虚拟的、没有实际架设基准站建立原始基准数据的技术,故称之“虚拟基准站”(VRS)。 RTK天线的安装位置需合理选择,以确保接收信号的强度和质量。深圳RTK天线测试板卡
RTK天线,导航,为海洋探测保驾护航。深圳时钟RTK天线
GPS-RTK使用原理是利用位于基准站上的GPS接收机观测的卫星数据,通过数据通信链实时发送出去,而位于附近的移动站GPS接收机在对卫星观测的同时,也接收来自基准站的电台信号,通过对所收到的信号进行实时处理,给出移动站的三维坐标,并估其精度。
GPS-RTK测量方法(一).静态定位:认为接收机的天线在整个观测工作中是固定不变的,静态定位一般用于高精度的测量定位,多台接收机在不同的测站上,进行测量同步观测。
1.架设仪器,开机等待连接卫星;
2.根据要求选择观测时段,确定两端有已知点搭接后,开始进行测量3.通过测量软件进行计算。
(二),动态定位:认为接收机的天线在整个观测工作中是变化的,根据周围的点***运动的方法测定GPS信号机的瞬时位置,
1.设置基站,确保线路正确
2.踩点,同坐标进行匹配
3.同坐标进行匹配,建立坐标系,开始测量 深圳时钟RTK天线
文章来源地址: http://txcp.m.chanpin818.com/tianxianyk/txtxhv/deta_25255500.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。